The same techniques will work to analyze any delay network, although for more complicated networks it becomes harder to characterize the results, or to design the network to have specific, desired properties. Another point of view can sometimes be usefully brought to the situation, particularly when flat frequency responses are needed, either in their own right or else to ensure that a complex, recirculating network remains stable at feedback gains close to one.
The central fact we will use is that if any delay network, with either one or many inputs and outputs, is constructed so that its output power (averaged over time) always equals its input power, that network has to have a flat frequency response. This is almost a tautology; if you put in a sinusoid at any frequency on one of the inputs, you will get sinusoids of the same frequency at the outputs, and the sum of the power on all the outputs will equal the power of the input, so the gain, suitably defined, is exactly one.
In order to work with power-conserving delay networks we will
need an explicit definition of ``total average power". If there is
only one signal (call it ![]() ), the average power is
given by:
), the average power is
given by:
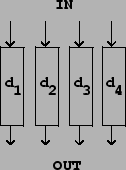
It turns out that a wide range of interesting delay networks has the property that the total power output equals the total power input; they are called unitary. To start with, we can put any number of delays in parallel, as shown in Figure 7.11. Whatever the total power of the inputs, the total power of the outputs has to equal it.
A second family of power-preserving transformations is composed
of rotations and reflections of the signals ![]() ,
... ,
,
... , ![]() , considering them, at each fixed
time point
, considering them, at each fixed
time point ![]() , as the
, as the ![]() coordinates
of a point in
coordinates
of a point in ![]() -dimensional space. The rotation or
reflection must be one that leaves the origin
-dimensional space. The rotation or
reflection must be one that leaves the origin
![]() fixed.
fixed.
For each sample number ![]() , the total
contribution to the average signal power is proportional to
, the total
contribution to the average signal power is proportional to
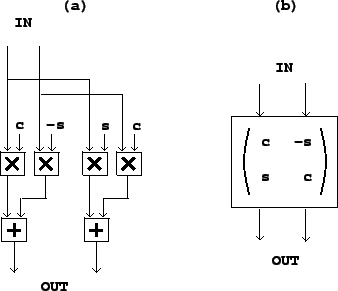 |
Figure 7.12 shows a rotation matrix
operating on two signals. In part (a) the transformation is shown
explicitly. If the input signals are ![]() and
and
![]() , the outputs are:
, the outputs are:
For an alternative description of rotation in two dimensions,
consider complex numbers
![]() and
and
![]() . The above transformation
amounts to setting
. The above transformation
amounts to setting
If we perform a rotation on a pair of signals and then invert
one (but not the other) of them, the result is a reflection. This also preserves total signal
power, since we can invert any or all of a collection of signals
without changing the total power. In two dimensions, a reflection
appears as a transformation of the form
Special and useful rotation and reflection matrices are obtained
by setting
![]() , so that
, so that
![]() . This allows us to
simplify the computation as shown in Figure 7.13 (part a) because each signal need only be
multiplied by the one quantity
. This allows us to
simplify the computation as shown in Figure 7.13 (part a) because each signal need only be
multiplied by the one quantity ![]() .
.
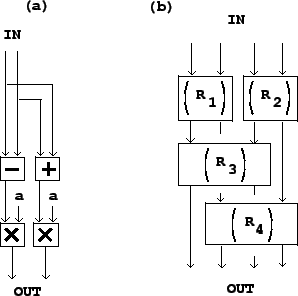 |
More complicated rotations or reflections of more than two input
signals may be made by repeatedly rotating and/or reflecting them
in pairs. For example, in Figure 7.13 (part
b), four signals are combined in pairs, in two successive stages,
so that in the end every signal input feeds into all the outputs.
We could do the same with eight signals (using three stages) and so
on. Furthermore, if we use the special angle ![]() , all the input signals will contribute equally to each
of the outputs.
, all the input signals will contribute equally to each
of the outputs.
Any combination of delays and rotation matrices, applied in succession to a collection of audio signals, will result in a flat frequency response, since each individual operation does. This already allows us to generate an infinitude of flat-response delay networks, but so far, none of them are recirculating. A third operation, shown in Figure 7.14, allows us to make recirculating networks that still enjoy flat frequency responses.
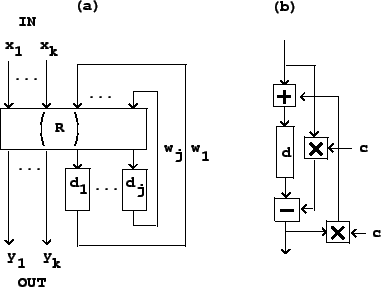 |
Part (a) of the figure shows the general layout. The
transformation ![]() is assumed to be any combination of
delays and mixing matrices that preserves total power. The signals
is assumed to be any combination of
delays and mixing matrices that preserves total power. The signals
![]() go into a unitary delay
network, and the output signals
go into a unitary delay
network, and the output signals
![]() emerge. Some other
signals
emerge. Some other
signals
![]() (where
(where ![]() is not necessarily equal to
is not necessarily equal to ![]() ) appear at the
output of the transformation
) appear at the
output of the transformation ![]() and are fed back to
its input.
and are fed back to
its input.
If ![]() is indeed power preserving, the total input
power (the power of the signals
is indeed power preserving, the total input
power (the power of the signals
![]() plus that of the signals
plus that of the signals
![]() ) must equal the output
power (the power of the signals
) must equal the output
power (the power of the signals
![]() plus
plus
![]() ), and subtracting all the
), and subtracting all the
![]() from the equality, we find that the total
input and output power are equal.
from the equality, we find that the total
input and output power are equal.
If we let ![]() so that there is one
so that there is one ![]() ,
, ![]() , and
, and ![]() , and let the
transformation
, and let the
transformation ![]() be a rotation by
be a rotation by ![]() followed by a delay of
followed by a delay of ![]() samples on the
samples on the
![]() output, the result is the well-known
all-pass filter. With some juggling, and letting
output, the result is the well-known
all-pass filter. With some juggling, and letting
![]() , we can show it is
equivalent to the network shown in part (b) of the figure. All-pass
filters have many applications, some of which we will visit later
in this book.
, we can show it is
equivalent to the network shown in part (b) of the figure. All-pass
filters have many applications, some of which we will visit later
in this book.