In Section 7.4 we analyzed the impulse response of a recirculating comb filter, of which the one-pole low-pass filter is a special case. Figure 8.22 shows the result for two low-pass filters and one complex one-pole resonant filter. All are elementary recirculating filters as introduced in Section 8.2.3. Each is normalized to have unit maximum gain.
In the case of a low-pass filter, the impulse response gets
longer (and lower) as the pole gets closer to one. Suppose the pole
is at a point ![]() (so that the cutoff frequency is
(so that the cutoff frequency is
![]() radians). The normalizing factor is also
radians). The normalizing factor is also
![]() . After
. After ![]() points, the output
diminishes by a factor of
points, the output
diminishes by a factor of
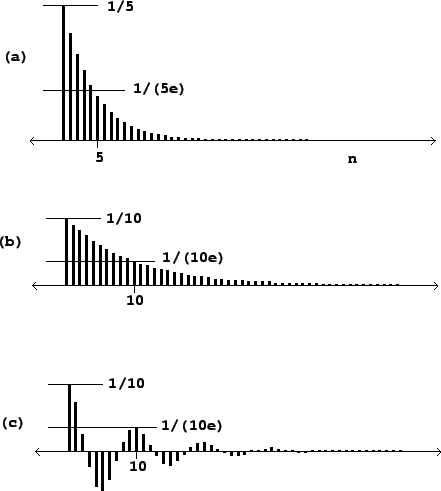 |
The situation gets more interesting when we look at a resonant
one-pole filter, that is, one whose pole lies off the real axis. In
part (c) of the figure, the pole ![]() has absolute value
0.9 (as in part b), but its argument is set to
has absolute value
0.9 (as in part b), but its argument is set to ![]() radians. We get the same settling time as in part
(b), but the output rings at the resonant frequency (and so at a
period of 10 samples in this example).
radians. We get the same settling time as in part
(b), but the output rings at the resonant frequency (and so at a
period of 10 samples in this example).
A natural question to ask is, how many periods of ringing do we
get before the filter decays to strength ![]() ? If
the pole of a resonant filter has magnitude
? If
the pole of a resonant filter has magnitude ![]() as
above, we have seen in Section 8.2.3 that the bandwidth
(call it
as
above, we have seen in Section 8.2.3 that the bandwidth
(call it ![]() ) is about
) is about ![]() , and we see here
that the settling time is about
, and we see here
that the settling time is about ![]() . The resonant
frequency (call it
. The resonant
frequency (call it ![]() ) is the argument of the
pole, and the period in samples of the ringing is
) is the argument of the
pole, and the period in samples of the ringing is ![]() . The number of periods that make up the
settling time is thus:
. The number of periods that make up the
settling time is thus: