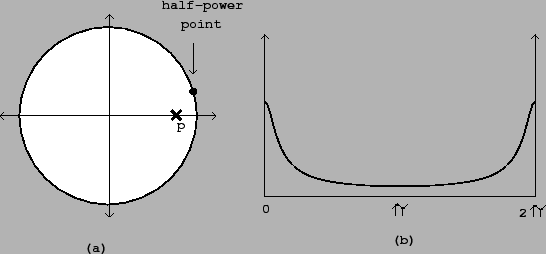
The one-pole low-pass filter has a single pole located at a
positive real number ![]() , as pictured in Figure
8.12. This is just a recirculating comb
filter with delay length
, as pictured in Figure
8.12. This is just a recirculating comb
filter with delay length ![]() , and the analysis of
section 7.4
applies. The maximum gain occurs at a frequency of zero,
corresponding to the point on the circle closest to the point
, and the analysis of
section 7.4
applies. The maximum gain occurs at a frequency of zero,
corresponding to the point on the circle closest to the point
![]() . The gain there is
. The gain there is ![]() .
If we move a distance of
.
If we move a distance of ![]() units up or down from the
real (horizontal) axis, the distance increases by a factor of about
units up or down from the
real (horizontal) axis, the distance increases by a factor of about
![]() , and so we expect the half-power
point to occur at an angular frequency of about
, and so we expect the half-power
point to occur at an angular frequency of about ![]() .
.
This calculation is often made in reverse: if we wish the
half-power point to lie at a given angular frequency ![]() , we set
, we set ![]() . This
approximation only works well if the value of
. This
approximation only works well if the value of ![]() is well under
is well under ![]() , as it usually
is in practice.
, as it usually
is in practice.
It is customary to normalize the one-pole lowpass filter,
multiplying it by the constant factor ![]() in order to
give a gain of 1 at zero frequency; nonzero freqencies will then
get a gain less than one.
in order to
give a gain of 1 at zero frequency; nonzero freqencies will then
get a gain less than one.
The frequency response is graphed in Figure 8.12 part (b). The audible frequencies only reach
to the middle of the graph; the right-hand side of the frequency
response curve all lies above the Nyquist frequency ![]() .
.
The one-pole lowpass filter is often used to smooth noisy signals to seek slow-moving trends in them. For instance, if you use a physical controller and care about changes on the order of 1/10 second or so, you can smooth the control by using a low-pass filter whose half-power point is 20 or 30 cycles per second.