As mentioned before, interpolation schemes are often used to increase the accuracy of table lookup. Here we will give a somewhat simplified account of the effects of table sizes and interpolation schemes on the result of table lookup.
To speak of error in table lookup, we must view the wavetable as a sampled version of an underlying function--and when we ask for a value of the underlying function which lies between the points of the wavetable, the error is the difference between the result of the wavetable lookup and the ``ideal" value of the function at that point. The most revealing study of wavetable lookup error assumes that the underlying function is the SINUSOID of chapter 1. We can then understand what happens to other wavetables by considering them as superpositions (sums) of sinusoids.
The accuracy of lookup from a wavetable containing a real sinusoid depends on two factors: the quality of the interpolation scheme, and the period of the sinusoid. In general, the longer the period of the sinusoid, the more accurate the result.
In the case of a synthetic wavetable, we might know its sinusoidal components from having specified them--in which case the issue becomes one of choosing a wavetable size appropriately, when calculating the wavetable, to match the interpolation algorithm and meet the desired standard of accuracy. In the case of recorded sounds, the accuracy analysis might lead us to adjust the sample rate of the recording, either at the outset or else by resampling later.
Interpolation error for a sinusoidal wavetable can have two components: first, the continuous signal (the theoretical result of reading the wavetable continuously in time, as if the output sample rate were infinite) might not be a pure sinusoid; and second, the amplitude might be wrong. (It is possible to get phase errors as well, but only through carelessness; and we won't worry about that here.)
In this treatment we'll only consider polynomial interpolation
schemes such as rounding, linear interpolation, and cubic
interpolation. These schemes amount to evaluating polynomials (of
degree zero, one, and three, respectively) in the interstices
between points of the wavetable. The idea is that, for any index
![]() , we choose a nearby ``good" point
, we choose a nearby ``good" point
![]() , and let the output be calculated by
some polynomial:
, and let the output be calculated by
some polynomial:
Figure 2.11 shows the effect of using linear (two-point) interpolation to fill in a sinusoid of period 6. At the top are three traces: the original sinusoid, the linearly-interpolated result of using 6 points per period to represent the sinusoid, and finally, another sinusoid, of slightly smaller amplitude, which better matches the six-segment waveform. The error introduced by replacing the original sinusoid by the linearly interpolated version has two components: first, a (barely perceptible) change in amplitude, and second, a (very perceptible) distortion of the wave shape.
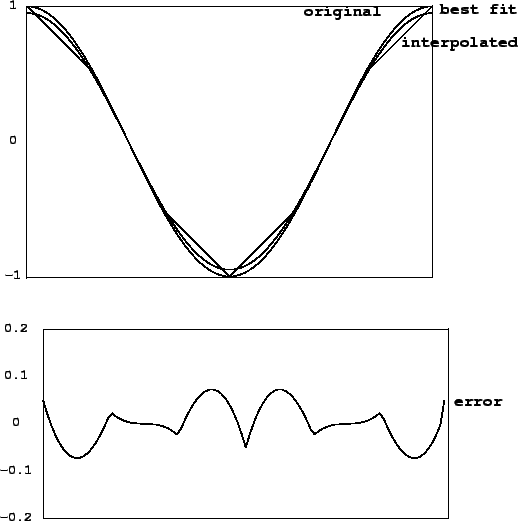 |
The bottom graph in the figure shows the difference between the segmented waveform and the best-fitting sinusoid. This is a residual signal all of whose energy lies in overtones of the original sinusoid. As the number of points increases, the error gets smaller in magnitude. Since the error is the difference between a sinusoid and a sequence of approximating line segments, the magnitude of the error is roughly proportional to the square of the phase difference between each pair of points, or in other words, inversely proportional to the square of the number of points in the wavetable. Put another way, wavetable error decreases by 12 dB each time the table doubles in size. (This approximation is only good for tables with 4 or more points.)
Four-point (cubic) interpolation works similarly. The formula
is:
The allowable input domain for table lookup depends on the
number of points of interpolation. In general, if using ![]() -point interpolation into a table with
-point interpolation into a table with ![]() points, the inputs may range over an interval of
points, the inputs may range over an interval of ![]() points. If
points. If ![]() (i.e., no
interpolation at all), the domain is from
(i.e., no
interpolation at all), the domain is from ![]() to
to
![]() (including the endpoint at
(including the endpoint at ![]() but excluding the one at
but excluding the one at ![]() ) if input values are
truncated (and we will always use truncation in this book when
doing non-interpolated table lookup). The domain is from
-
) if input values are
truncated (and we will always use truncation in this book when
doing non-interpolated table lookup). The domain is from
-![]() to
to ![]() if, instead, we
round the input to the nearest integer instead of interpolating. In
either case, the domain stretches over a length of
if, instead, we
round the input to the nearest integer instead of interpolating. In
either case, the domain stretches over a length of ![]() points.
points.
For two-point interpolation, the inputs must lie between the
first and last points, that is, between ![]() and
and
![]() . So the
. So the ![]() points suffice
to define the function over a domain of length
points suffice
to define the function over a domain of length ![]() . For four-point interpolation, we cannot get values for
inputs between 0 and 1 (not having the required two points to the
left of the input) and neither can we for the space between the
last two points (
. For four-point interpolation, we cannot get values for
inputs between 0 and 1 (not having the required two points to the
left of the input) and neither can we for the space between the
last two points (![]() and
and ![]() . So in this
case the domain reaches from
. So in this
case the domain reaches from ![]() to
to ![]() and has length
and has length ![]() .
.
Periodic waveforms stored in wavetables require special
treatment at the ends of the table. For example, suppose we wish to
store a pure sinusoid of length ![]() . For a
noninterpolating table, it suffices to set, for example,
. For a
noninterpolating table, it suffices to set, for example,
For four-point interpolation, the cycle must be adjusted to
start at the point ![]() , since we can't get
properly interpolated values out for inputs less than one. If,
then, one cycle of the wavetable is arranged from
, since we can't get
properly interpolated values out for inputs less than one. If,
then, one cycle of the wavetable is arranged from ![]() to
to ![]() , we must supply extra points for
, we must supply extra points for ![]() (copied from
(copied from ![]() ), and also
), and also ![]() and
and ![]() , copied from
, copied from ![]() and
and
![]() , to make a table of length
, to make a table of length ![]() . For the same sinusoid as above, the table should
contain:
. For the same sinusoid as above, the table should
contain: